
Deploying Humanoid Robots: Step-by-Step Implementation Guide
How to Implement Humanoid Robots: A Step-by-Step Guide for US Factories

Key Takeaway
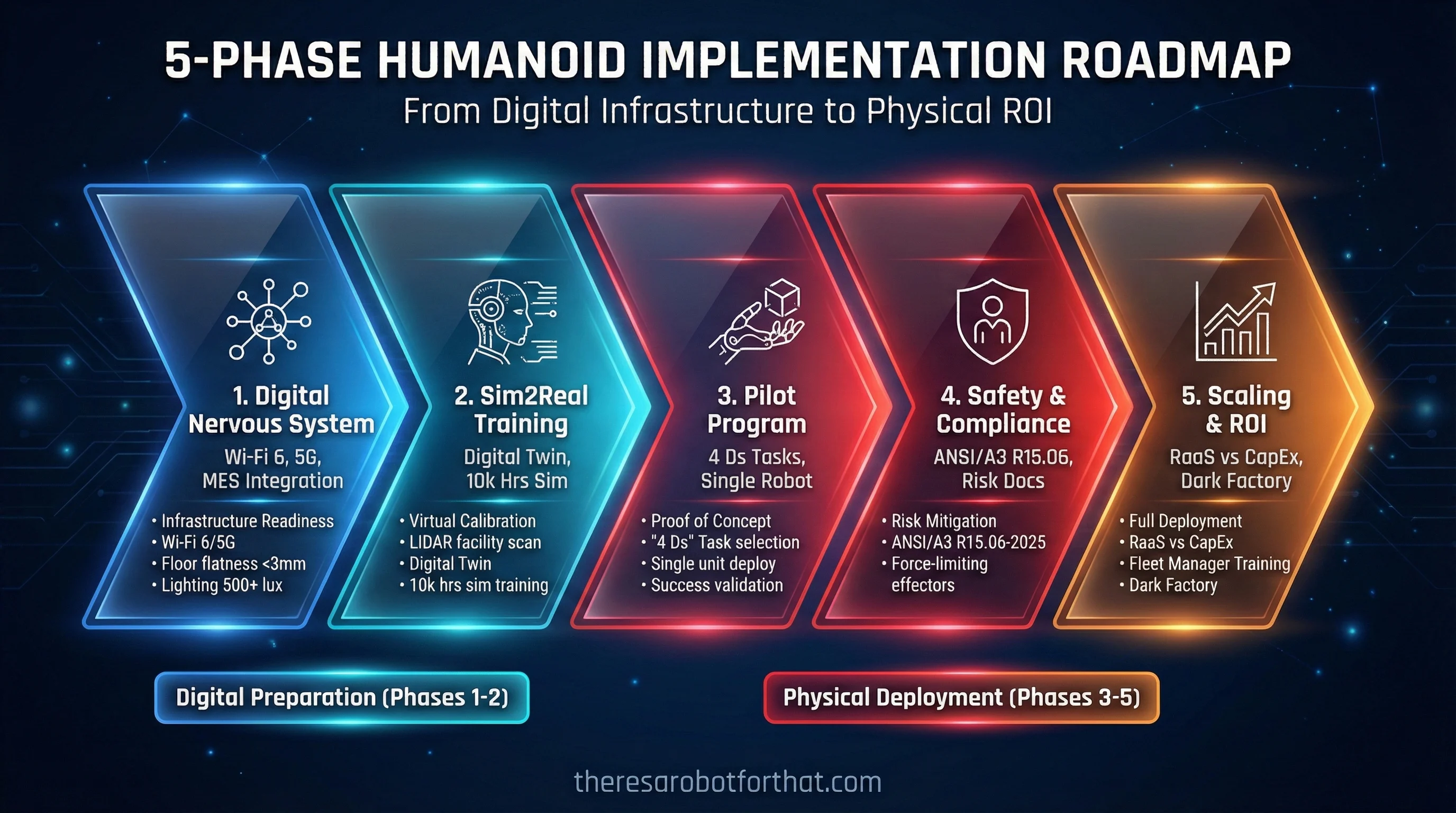
A successful humanoid robot implementation guide requires five phases: assessment, simulation, pilot, compliance, and scaling.
- MES integration enables real-time robot telemetry
- Sim2Real training simulates 10,000 hours in one
- ANSI/A3 R15.06-2025 compliance is legally mandatory
Last updated: 15 January 2026
Humanoid robots crossed the threshold from tech demos to factory deployments in 2026. According to International Federation of Robotics data, US manufacturers installed 44,303 industrial robots in 2023. That number surged as Figure 02 and Agility Robotics Digit moved from pilot programs to production lines.
The question shifted from "if" to "how." CTOs and plant managers need a roadmap that addresses infrastructure, training, safety, and ROI. This guide provides that roadmap: Assessment → Simulation → Pilot → Scale.
Each phase has specific requirements. Skip one and the pilot fails.
Phase 1: The "Digital Nervous System" Assessment
According to industry implementation protocols, the "Digital Nervous System" architecture connects the Robot Brain (AI) to the Factory Spine (MES) via local Edge Computing. Without this infrastructure, humanoid robots become expensive mannequins that can't communicate with your production systems.
"Plug and play" is a myth. Your robot needs to know where it is, what it's carrying, and what the next task is. That data flows through three layers: the robot's onboard AI, edge computing nodes that handle latency-sensitive decisions, and your Manufacturing Execution System that orchestrates production.
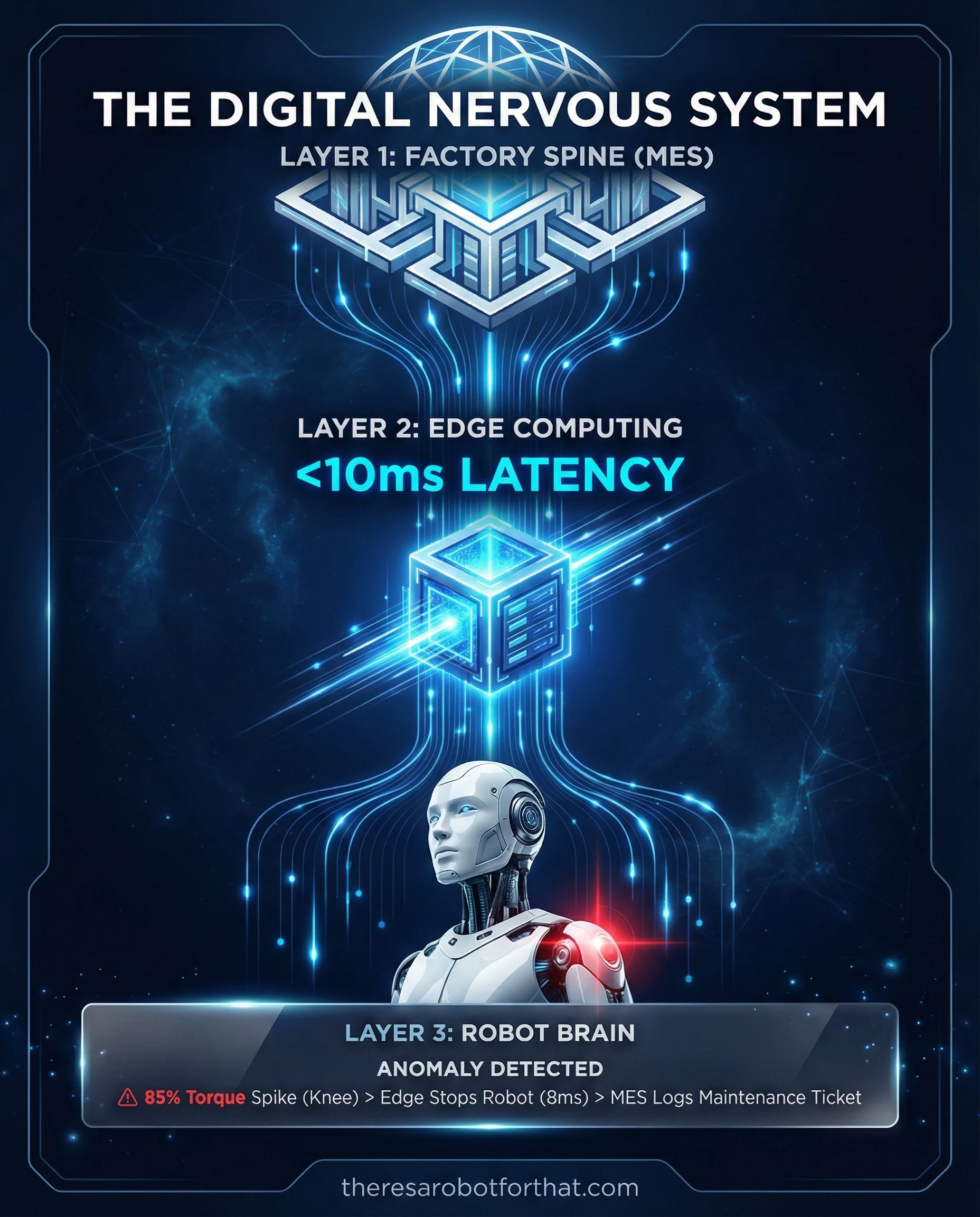
A tote-moving robot stops mid-aisle. Its knee joint reports 85% torque. The edge node flags the anomaly. The MES logs the location. Your maintenance team discovers oil residue on the floor. You fix the floor before the joint fails. That's the Digital Nervous System working.
Site Readiness Checklist
Your facility needs these elements before a robot arrives:
Wi-Fi 6 or 5G coverage: No dead zones. Robots transmit telemetry every 100 milliseconds. A coverage gap means the robot stops or operates blind.
Floor flatness within 3mm variance: Bipedal robots balance differently than wheeled AGVs. Expansion joints, oil residue, and uneven epoxy coatings cause balance failures. Measure your floor with a profilometer, don't guess. Floor conditions directly impact fall zone calculations under emerging safety standards.
Consistent lighting at 500+ lux: Vision systems need stable illumination. Shadows from overhead cranes confuse object detection. Install supplemental LED panels in work zones.
Edge computing nodes within 50 meters: Cloud latency kills real-time decisions. Local compute handles navigation and manipulation. According to NVIDIA's robotics infrastructure guidelines, edge nodes reduce decision latency from 200ms to under 10ms.
MES integration API access: Your robot needs to pull work orders and push completion data. If your MES is a black box, the robot can't integrate. Budget for middleware if necessary.
Your factory is 40 years old. Aisles built for humans, not robots. Traditional automation wants you to rip out the floor. Industrial humanoid robots walk through the door you already have. But they need the nervous system first.
Battery life and endurance matter for multi-shift operations. Recent battery life and endurance benchmarks show that modern humanoids can operate for extended periods, but charging infrastructure must be planned into your facility layout.
Phase 2: Simulation-First (Sim2Real) Training
Sim2Real manufacturing workflows utilize platforms like NVIDIA Isaac to create digital twins of a facility, allowing robots to train on thousands of scenarios before physical deployment. According to NVIDIA Robotics, engineers can simulate 10,000 training hours in one hour of compute time.
Physical training is expensive. A robot collides with a pallet. Downtime costs $500/hour. The robot needs recalibration. Now multiply that by 1,000 learning iterations. Simulation eliminates that cost and risk.
The Sim2Real workflow has three steps:
1. Scan your facility. Use LIDAR to capture the exact layout. Every aisle width, every shelf height, every floor texture. The digital twin must match reality within centimeters. Inaccurate scans produce policies that fail on transfer.
2. Train the policy in simulation. The robot navigates the virtual factory. It picks virtual totes. It encounters virtual obstacles: a forklift blocking an aisle, a pallet placed incorrectly, a worker crossing its path. The AI learns to handle each scenario. You run millions of variations. The robot fails safely in software.
3. Transfer the trained policy to hardware. The validated policy loads onto the physical robot. It already "knows" your facility. First-day success rates jump from 60% to 95%+ with Sim2Real pre-training.
This is Step 0, not optional. Deployments that skip simulation face higher failure rates. The robot encounters a scenario it never trained for. It stops. Your operators lose confidence. The pilot stalls.
Simulation also reveals infrastructure problems before hardware arrives. Your digital twin shows a dead zone in aisle 7 where Wi-Fi drops. You fix it before the robot ever rolls out. That's the value of training in the virtual world first.
Phase 3: Pilot Program Structure & Case Studies
Successful pilot programs focus on the "4 Ds" (Dull, Dirty, Dangerous, Dear) tasks, as demonstrated by deployments at BMW and Amazon. These tasks have high repetition and low variability. Perfect for robots learning industrial workflows.
Select a task where failure doesn't halt production. Tote transport, not final assembly. Material handling, not quality inspection. The robot learns on non-critical paths. Your team builds confidence. Then you scale to higher-value tasks.
Case Study: Amazon & Agility Robotics Digit
Task: Moving empty totes from processing stations to staging areas.
Setup: Amazon deployed Digit in a Seattle fulfillment center. The robot navigates human-populated aisles. It identifies empty totes via computer vision. It picks, carries, and stacks them in designated zones.
Results: According to Agility Robotics, the pilot achieved a 98% task success rate. Operating costs averaged $10-12 per hour under a Robot-as-a-Service model. Human labor for the same task costs $30+ per hour fully burdened.
Key insight: The task was simple but high-volume. Digit moved 400 totes per shift. Human workers were reassigned to exception handling and quality control.
Case Study: BMW & Figure 02
Task: Sheet metal insertion for door panel assembly.
Setup: BMW deployed the Figure 02 robot at its Spartanburg, South Carolina plant. The robot picks sheet metal blanks from a cart. It inserts them into a stamping press with sub-millimeter precision. The task requires force feedback and real-time adjustment.
Results: According to Figure AI, the robot achieved less than 0.1mm insertion accuracy with 99% first-pass success. The task previously required two human workers per shift. Now one worker supervises three robots.
Key insight: BMW chose a task with clear success metrics. Either the part fits or it doesn't. No ambiguity. The robot's precision exceeded human capability. For more on Figure 02 and F.03 developments, see the latest updates on next-generation capabilities.
Both pilots started small. Amazon didn't deploy 100 robots on day one. BMW didn't hand over final assembly. They chose bounded tasks with measurable outcomes. Success built momentum.
Phase 4: Safety & Compliance (ANSI/A3 R15.06-2025)
The ANSI/A3 R15.06-2025 standard specifically addresses safety requirements for collaborative humanoid robots, including end-effector force limits and cybersecurity protocols. According to A3 Association for Advancing Automation, this updated standard became the legal baseline for fenceless robot operations in the US. For a comprehensive breakdown of ISO 10218, ISO 25785-1, and OSHA requirements, see our 2026 Humanoid Robot Safety Standards Guide.
Old robot standards assumed cages. The robot worked in a fenced zone. Humans stayed out. Collaborative humanoid robots work beside humans. Different physics, different risks, different rules.
Key Updates in ANSI/A3 R15.06-2025
Speed and separation monitoring: The robot must maintain minimum distances from humans. If a worker enters the zone, the robot slows or stops. The standard specifies reaction times under 200 milliseconds.
Force-limiting end-effectors: Grippers and hands must limit contact force. The standard caps forces at 150 newtons for transient contact. Sustained contact must stay below 75 newtons. These limits prevent injury during accidental collisions.
Cybersecurity protocols: Connected robots are network endpoints. The standard requires encrypted telemetry, authenticated command channels, and intrusion detection. A compromised robot is a safety hazard.
Risk assessment for bipedal locomotion: Humanoid robots have different failure modes than wheeled robots. A balance failure can cause the robot to fall toward a worker. The standard mandates fall-path analysis and emergency stop systems.
Fenceless operation is not optional safety theater. It's a legal requirement. Inspectors will audit your deployment. Non-compliance means shutdown and fines.
Deploying a humanoid robot without ANSI/A3 R15.06-2025 compliance exposes your company to liability.
If a robot injures a worker and you lack documented risk assessments, you face regulatory action and lawsuits.
Budget for compliance engineering before pilot launch.
For a complete breakdown of compliance requirements, see our 2026 Humanoid Robot Safety Standards Guide.
The standard also distinguishes between collaborative zones and restricted zones. Collaborative zones allow human-robot interaction. Restricted zones are robot-only during operation. Your facility layout must clearly mark both.
Phase 5: Scaling & ROI Analysis
Financial analysis indicates that humanoid robots like Digit operate at approximately $10-12 per hour, offering a significant cost advantage over the $30/hour average for US warehouse labor. But the full ROI picture includes capital costs, training, and workforce transition.
CapEx vs. Robot-as-a-Service (RaaS)
Outright purchase: A humanoid robot costs $30,000-$150,000 depending on capabilities. You own the hardware. You handle maintenance. You absorb obsolescence risk. Depreciation schedules run 5-7 years.
RaaS model: You pay $10-12 per operating hour. The vendor handles maintenance, software updates, and hardware swaps. No upfront capital. You scale up or down based on demand. Mid-market manufacturers prefer this model because it converts CapEx to OpEx.
The break-even point depends on utilization. A robot running two shifts per day (16 hours) costs $192/day under RaaS. That's $70,080 per year. Human labor for the same hours costs $140,160 at $30/hour. You save $70,080 annually per robot.
But the calculation changes if the robot only runs one shift. Utilization below 50% makes RaaS more expensive than human labor. Plan your task allocation carefully.
| Cost Element | Human Labor | RaaS Model (Digit) |
|---|---|---|
| Hourly rate | $30 | $10-12 |
| Annual cost (2 shifts) | $140,160 | $70,080 |
| Benefits/overhead | Included in rate | Included in rate |
| Training cost | $2,000-5,000/year | Included |
| Turnover cost | $4,000-8,000/replacement | Zero |
Workforce Transition: Operator to Fleet Manager
Your workers don't disappear. They evolve. The "Operator" becomes a "Robot Fleet Manager." One person supervises three to five robots. They handle exceptions: a robot encounters an unexpected obstacle, a sensor reports an anomaly, a task requires human judgment.
This transition requires training. Your operators need to understand robot telemetry, basic troubleshooting, and when to escalate to engineering. Budget 40-80 hours of training per fleet manager. The investment pays off in faster incident resolution and higher robot uptime.
Some facilities reach "Dark Factory" status: fully automated shifts with no human workers on the floor. Lights stay off to save energy. Robots operate 24/7. Humans monitor remotely. This is the end state for high-volume, low-variability production. But it takes years, not months.
For insights on scaling robot fleets, see how large-scale deployments are structured.
Leading Robot Comparison (2026 Edition)
Leading industrial humanoid robots in 2026 include the Figure 02, Agility Robotics Digit, and Unitree G1, each optimized for specific manufacturing and logistics tasks. Choosing the right model depends on your task requirements, payload needs, and facility constraints.
| Model | Manufacturer | Payload | Battery Life | Best For |
|---|---|---|---|---|
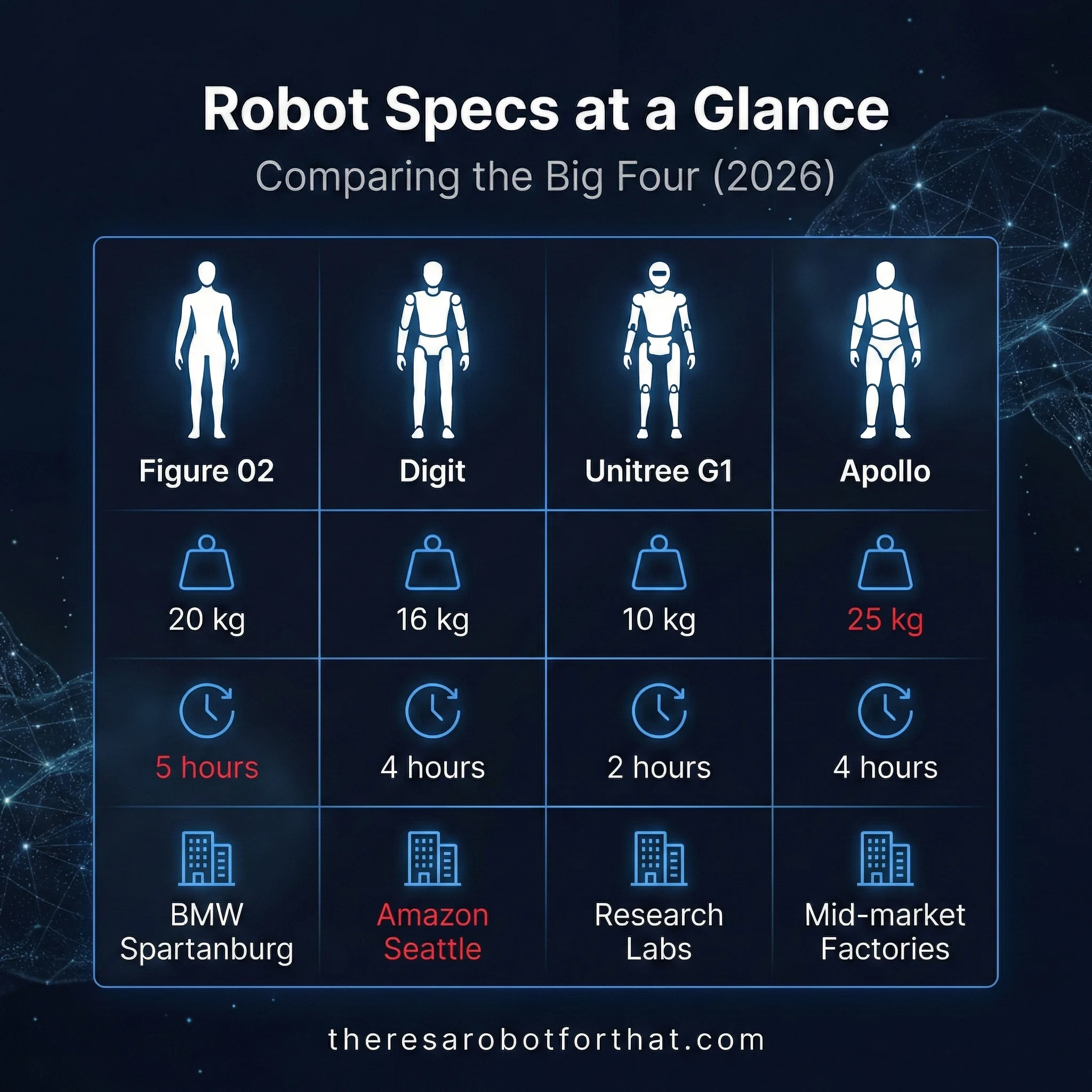
| Figure 02 | Figure AI | 20 kg | 5 hours | Automotive assembly, precision insertion |
| Digit | Agility Robotics | 16 kg | 4 hours | Logistics, tote handling, warehouse |
| Unitree G1 | Unitree Robotics | 10 kg | 2 hours | Research, general purpose, flexible tasks |
| Apollo | Apptronik | 25 kg | 4 hours | General manufacturing, material handling |
Figure 02 excels at precision tasks. Its dexterous hands and force feedback enable sub-millimeter accuracy. BMW uses it for sheet metal work. If your task requires tight tolerances, Figure 02 is the choice.
Digit dominates logistics. Its design prioritizes stability and payload over dexterity. Amazon deploys it for tote transport. If your task is "pick and carry," Digit delivers proven results.
Unitree G1 serves as a flexible platform. It's less specialized but more adaptable. Research facilities and pilot programs favor it. For more on Unitree G1 capabilities, see the expanding software ecosystem.
Apollo targets general manufacturing. Its higher payload capacity suits heavier parts. Apptronik positions it as a "universal worker" for mid-market factories.
No single robot fits every task. Match the robot's strengths to your task requirements. Precision work needs Figure 02. High-volume logistics needs Digit. Flexibility needs Unitree G1.
The Human Factor
Worker acceptance determines pilot success. Floor workers react with curiosity and anxiety when a 1.7-meter robot starts working beside them.
The humanoid form triggers responses wheeled robots don't. Workers attribute intent to bipedal machines. A wheeled robot that stops is a glitch. A humanoid that stops while facing you triggers threat assessment.
Successful deployments communicate early. Let workers control the robot via teleoperation. Show them the robot handles dull, dirty, dangerous tasks. Their jobs evolve, not disappear.
One BMW worker described the Figure 02 as "the new guy who never complains about overtime." That framing worked. The robot wasn't replacing him. It was taking the repetitive task he disliked. He moved to quality inspection, a role with more variety and higher pay.
Transparency builds trust. Show workers the robot's sensor view. Explain how it makes decisions. Invite feedback on task design. Workers who feel heard become advocates. Workers who feel threatened become obstacles.
Common Pitfalls
Choosing tasks too complex for day one. Start with tote transport. Multi-step assembly fails in early pilots. Build confidence with simple tasks first.
Underestimating floor requirements. Uneven joints and debris trip bipedal robots. Measure friction, don't guess. A $200 profilometer saves a $50,000 pilot.
IT blocking cloud access late. Robots need cloud for updates. Engage IT in Phase 1, not Phase 3. Late surprises kill timelines.
Skipping Sim2Real training. Physical-only training costs 10x more and takes 10x longer. Simulation isn't optional. It's the foundation.
Ignoring ANSI/A3 R15.06-2025 compliance. Non-compliance means legal liability. Budget for risk assessments and safety engineering. Cutting corners here ends careers.
Limitations & Alternatives
Humanoid robots aren't the answer for every task. High-speed assembly lines exceed their current cycle times. Delicate electronics assembly exceeds their dexterity. Outdoor environments with mud and rain exceed their environmental ratings.
When not to deploy humanoid robots:
Cycle times under 5 seconds: Traditional industrial arms are faster. Humanoids can't match the speed of a dedicated pick-and-place system.
Extreme precision under 0.01mm: Specialized CNC and robotic arms offer better accuracy. Humanoids are improving but not there yet.
Outdoor or harsh environments: Most humanoid robots are rated for indoor use. Dust, water, and temperature extremes cause failures.
Tasks requiring heavy lifting over 30kg: Current humanoid robots max out around 25kg payload. Heavier loads need traditional material handling equipment.
Consider wheeled AMRs for pure transport tasks. Consider collaborative arms for fixed-position assembly. Consider humanoid robots when the task requires human-like mobility and manipulation in a human-designed space.
Conclusion
A successful humanoid robot implementation guide for 2026 follows five phases: Digital Nervous System assessment, Sim2Real training, pilot program execution, ANSI/A3 R15.06-2025 compliance, and scaling with ROI analysis. Skip a phase and the pilot fails. Follow the roadmap and you join BMW, Amazon, and other manufacturers already deploying industrial humanoid robots.
The shift from tech demos to production deployments is complete. Robots like Figure 02 and Digit operate on factory floors today. The question isn't whether humanoid robots work. The question is whether your facility is ready.
Dark Factories represent the future: fully automated shifts, lights-out operations, robots working 24/7. That future arrives facility by facility, task by task. Your roadmap starts with infrastructure assessment. Then simulation. Then a small pilot. Then scale.
FAQ
How to implement humanoid robots in a factory?
Implementation requires five phases: assessment, simulation, pilot, compliance, and scaling. Manufacturers must upgrade Wi-Fi and lighting, create digital twins for Sim2Real training in NVIDIA Isaac, and conduct pilot programs on "4 Ds" tasks. Compliance with ANSI/A3 R15.06-2025 is mandatory for collaborative workspaces.
What is the cost of operating a humanoid robot like Digit?
Operating costs for Digit average $10-12 per hour under RaaS models. This figure includes maintenance and software updates, offering a substantial reduction compared to the typical $30+ per hour fully burdened cost of human warehouse labor in the US.
What are the safety standards for humanoid robots in 2026?
The primary safety standard is ANSI/A3 R15.06-2025, which governs collaborative robot operations. This updated standard mandates specific risk assessments for bipedal movement, force-limiting end-effectors, and cybersecurity protocols to ensure safe interaction between humans and fenceless robots. For detailed coverage including ISO 10218, the developing ISO 25785-1, and OSHA compliance, see our Humanoid Robot Safety Standards Guide.
How does Figure 02 compare to Tesla Optimus for manufacturing?
Figure 02 is currently optimized for high-precision automotive tasks. Demonstrated by its deployment at BMW for sheet metal insertion, Figure 02's integration with industrial environments and sub-millimeter accuracy makes it a more immediate candidate for specialized manufacturing lines in 2026.
What is Sim2Real training in robotics?
Sim2Real trains robots in virtual environments before physical deployment. Using platforms like NVIDIA Isaac, engineers can simulate thousands of training hours in a fraction of the time, validating policies for navigation and manipulation without risking physical hardware.
References
- International Federation of Robotics - US robot installation statistics - https://ifr.org/ifr-press-releases/news/u.s-companies-invest-heavily-in-robots
- Agility Robotics News - Digit operating costs and Amazon pilot data - https://agilityrobotics.com/news
- Figure AI News - Figure 02 BMW pilot and precision specifications - https://www.figure.ai/
- NVIDIA Robotics - Sim2Real workflows and Isaac Sim platform - https://www.nvidia.com/en-us/deep-learning-ai/industries/robotics/
- A3 Association for Advancing Automation - ANSI/A3 R15.06-2025 standards context - https://www.automate.org/